目录
这是 2021年山大未来科学营(夏季)- 人工智能与发明创造未来科学营 的作业
所以看看就行
基本信息
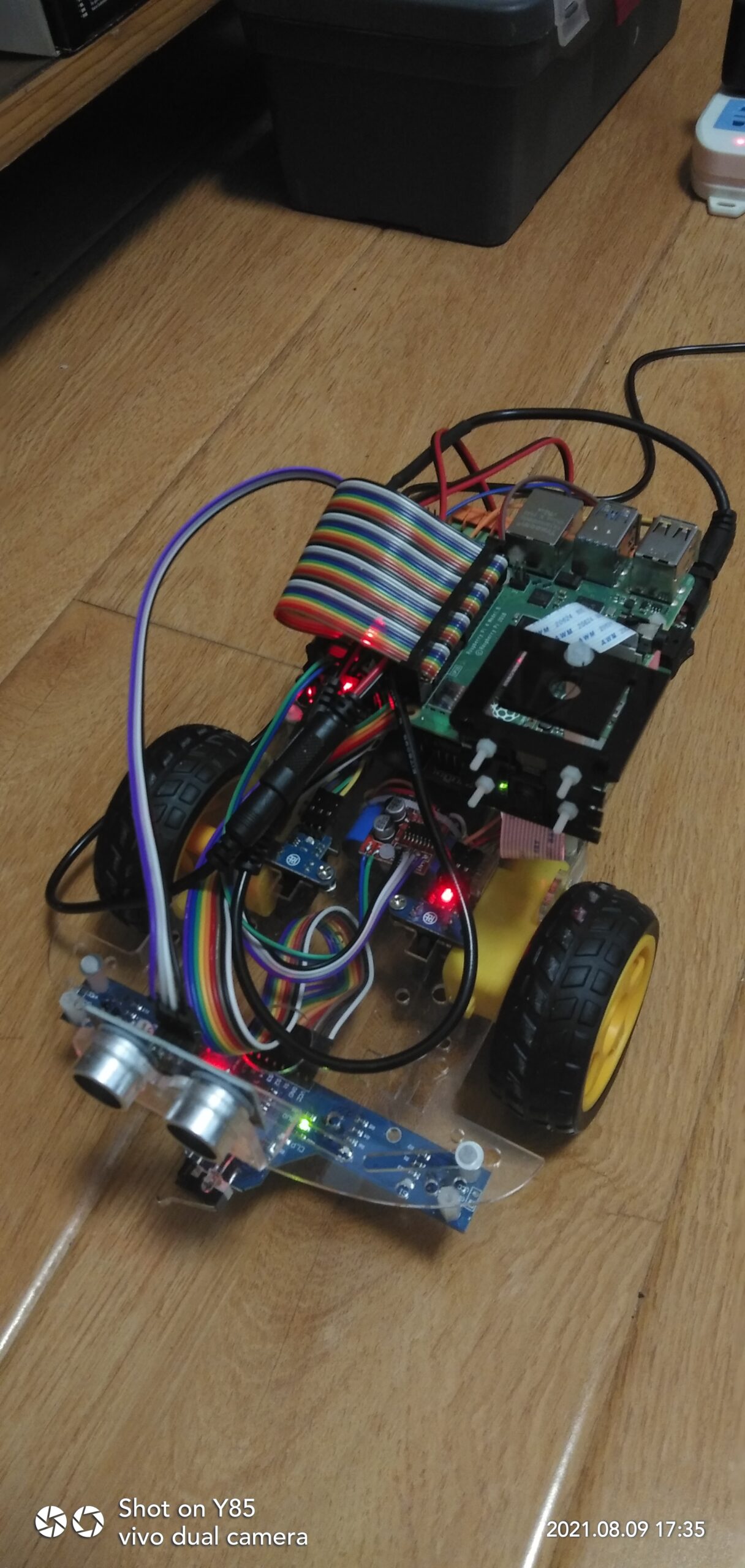
- 名称:远程智能房间巡逻警报机器人
解决家里/房间长期无人,但是有设备运行或其他需求,需要远程监控。可以方便远程监控家中环境,监控设备的运行状态,并且具有良好的机动性和灵活性,可以适应不同的房间环境。
硬件连接图
graph LR
摄像头 --- 树莓派
超声传感器 --- 扩展板
5路组件 --- 扩展板
树莓派 --- 扩展板
扩展板 --- 电机驱动板
扩展板 --- 测速左
扩展板 --- 测速右
电机驱动板 --- 电机左
电机驱动板 --- 电机右
扩展板 --- 电池软件框图
小车
graph TD
各传感器数据收集 --> 数据打包 --> 网络通信
摄像头画面收集 --> 压缩转码 --> 网络通信
网络通信 --> 数据解包 --> 电机控制
网络通信 --- Socket-UDP控制端
graph TD
操作收集 --> 数据打包 --> 网络通信
Socket-UDP --- 网络通信
网络通信 --> 传感器数据解包
网络通信 --> 摄像头画面解包
传感器数据解包 --> 可视化还原
摄像头画面解包 --> 可视化还原软件流程图
小车 测速计数 线程
graph TD
左轮计数回调 --> 左轮计数
右轮计数回调 --> 右轮计数小车 超声 线程
graph TD
开始 --> A{不停止?}
A -->|Yes| 发射超声脉冲
发射超声脉冲 --> 等待发射完成
等待发射完成 --> 等待回波
等待回波 --> 更新距离
更新距离 --> A
A -->|NO| 结束小车 电机 线程
graph TD
开始 --> A{不停止?}
A -->|YES| 执行电机命令
执行电机命令 --> A
A -->|NO| 结束小车 图像采集 线程
graph TD
开始 --> A{不停止?}
A -->|YES| 截取画面
截取画面 --> 打包数据
打包数据 --> UDP发送
UDP发送 --> A
A -->|NO| 关闭摄像头
关闭摄像头 --> 结束小车 UDP 线程
graph TD
开始 --> A{不停止?}
A -->|YES| 接受消息
接受消息 --> 更新电机指令
更新电机指令 --> 更新控制端网络地址
更新控制端网络地址 --> 打包传感器数据
打包传感器数据 --> UDP发送
UDP发送 --> A
A -->|NO| 结束控制端
graph TD
Tick开始 --> 打包电机命令
打包电机命令 --> 发送UDP消息
发送UDP消息 --> A{接受UDP消息}
A -->|13| 更新传感器变量
A -->|770| 更新摄像机缓冲区
A -->|NO| 请求更新摄像机画面
更新传感器变量 --> A
更新摄像机缓冲区 --> A
请求更新摄像机画面 --> Tick结束实现过程
- 小车搭建
- 测试各传感器功能
- 测试电机功能
- 测试舵机功能
- 控制端
- 基本UI布局
- 交互
- 各传感器数据上传
- 电机控制指令下载
- 图传
智能化移动物体检测环境信息建模自动路径决策
关键代码
创新点
显然JD有售
- 将遥控车和传感器结合,构成了一种新的具有远程监控功能的产品。
- 该项目改变了产品中的尺寸参数,提升了产品性能。
- 将网络遥控技术应用到遥控车领域,创造性的解决了遥控距离限制问题。
市场前景
市场前景就离谱
作为低成本解决方案,可以解决家庭中需要灵活监控的需求,受益人群为长时间外出但是家里有 7X24小时设备运行,需要无人值守,远程监控设备运行的人群。
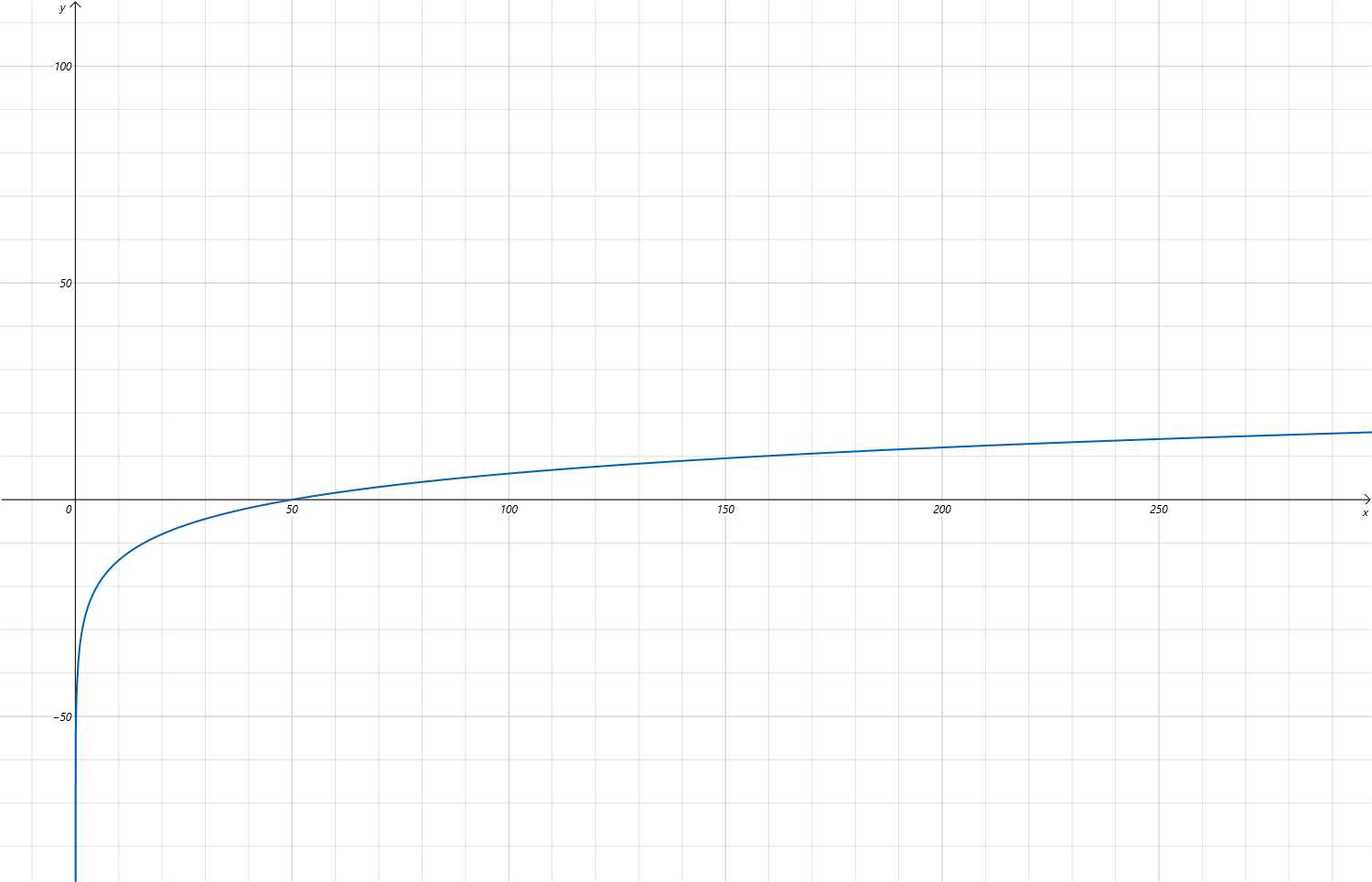
作为低成本解决方案,主要面向家庭使用,售价 1999 利润 500 。
利润比(百分比)随时间(天)变化:
产品展示